Robotics Examples
 MuJoCo · Franka arm — voice-controlled pick-and-place | 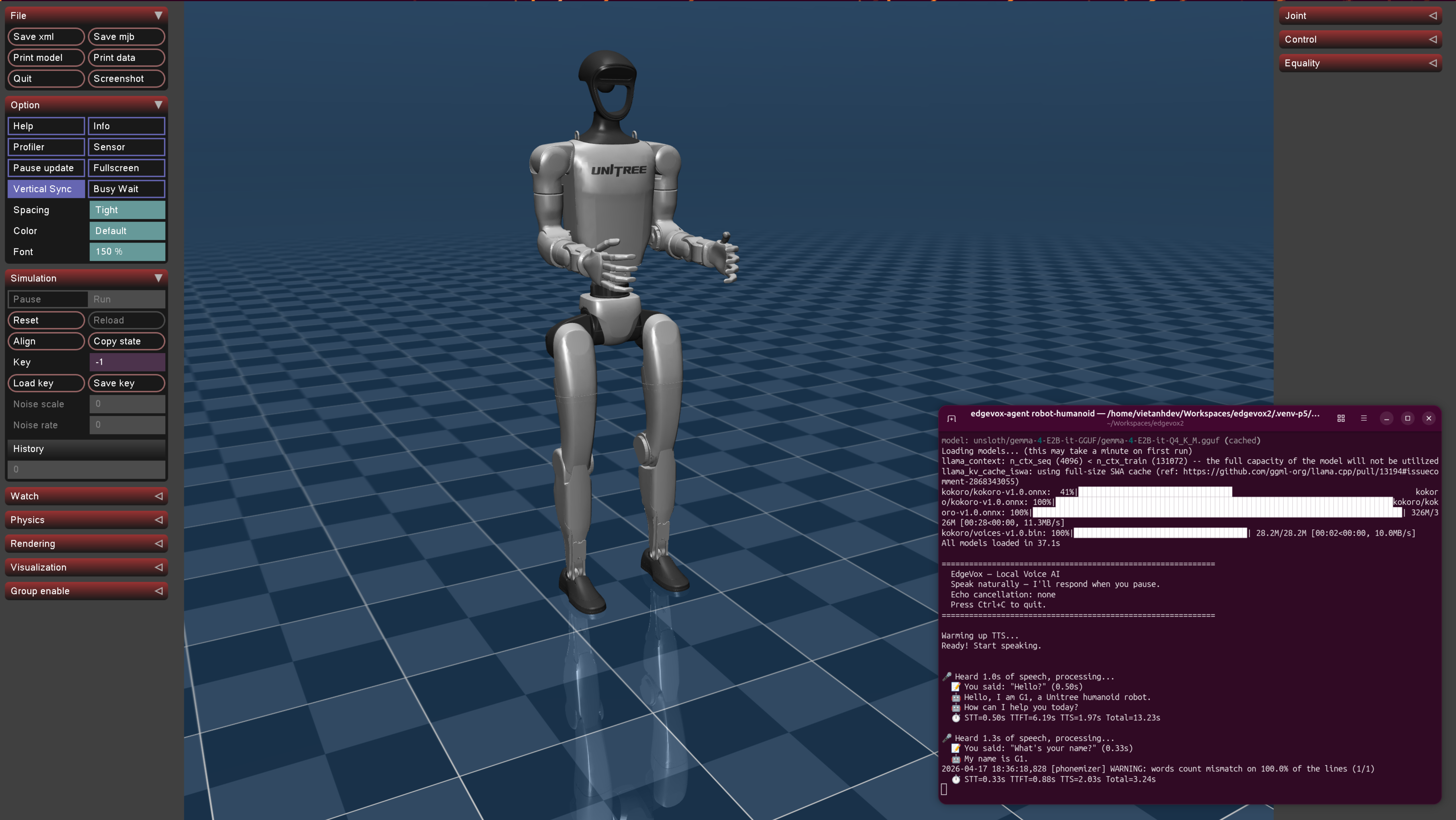 MuJoCo · Unitree G1 — procedural gait + ONNX policy slot |
Five end-to-end robot agents ship in edgevox.examples.agents. Each is a single Python file wiring an LLMAgent to a concrete SimEnvironment (or ROS2 bridge) through the voice pipeline. You can launch any of them from the CLI:
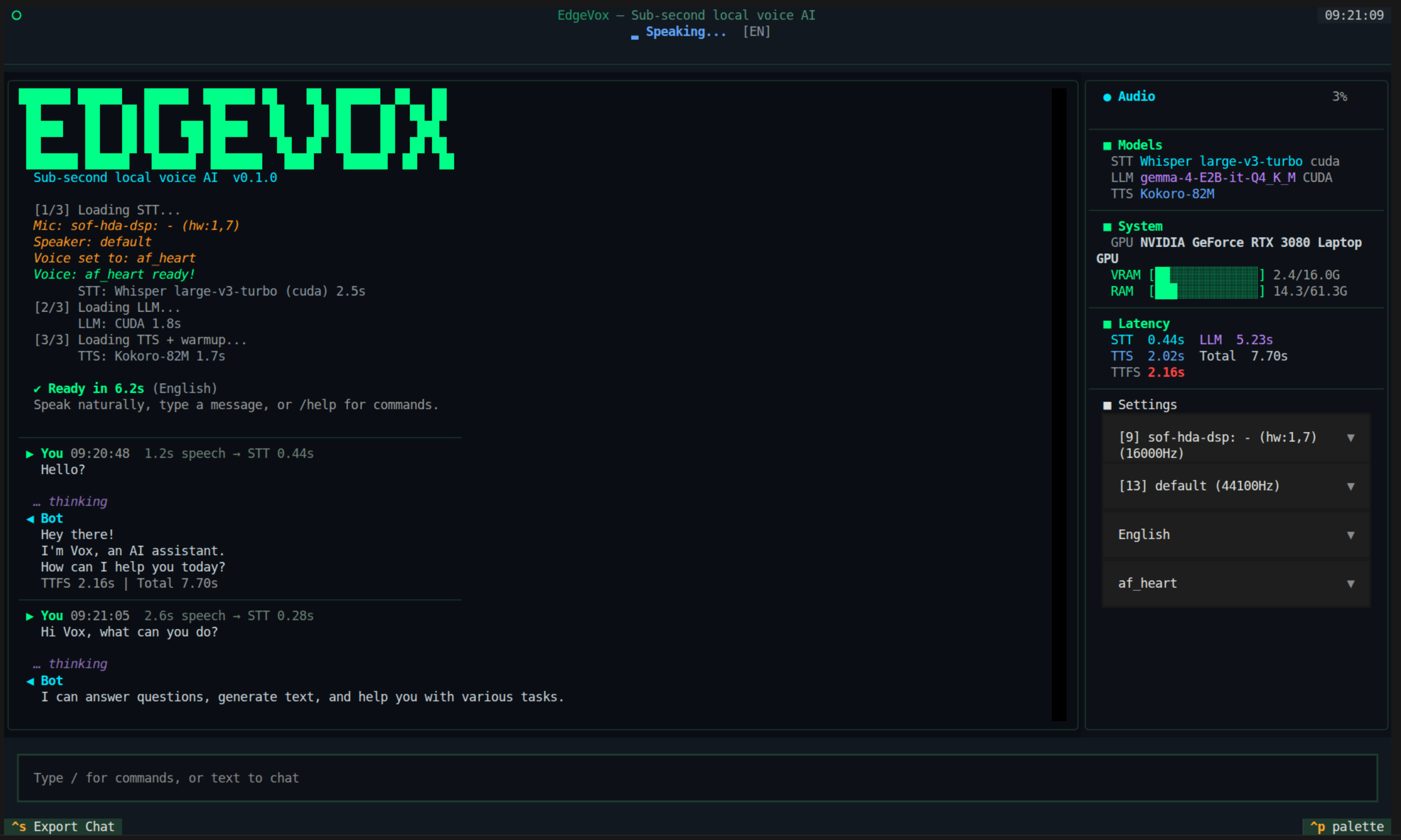
edgevox-agent <name> [--text-mode | --simple-ui | default TUI]Swap between text-only (fastest feedback loop), --simple-ui (headless voice), or the default TUI (live waveform + transcript + chat log). Every example respects the same agent harness — tools, hooks, interrupts, memory — so code you write for one simulator runs unchanged on the next tier.
robot-irsim — 2D mobile robot navigation
pip install 'edgevox[sim]'
edgevox-setup
edgevox-agent robot-irsim --text-modeA matplotlib window opens showing a 10×10 m apartment with four rooms. Type "go to the kitchen" and the blue robot drives visibly to the kitchen centroid. Type "stop" mid-flight and the skill preempts — the SafetyMonitor intercepts stop-words before the LLM is consulted, so the halt path doesn't wait on a model round-trip.
Tools exposed to the LLM: go_to_room, describe_surroundings, return_home, status. Cancellable skills: go_to, patrol_rooms — both expose GoalHandle.feedback so a user saying "slower" mid-skill adjusts the target speed without restarting the plan. Underlying: IrSimEnvironment (IR-SIM, LGPL — dynamic-linked) wraps the sim clock + cmd_vel publisher into the SimEnvironment Protocol.
Good first pick for: understanding how skills + safety-monitor + ctx.deps fit together without heavy 3D rendering cost.
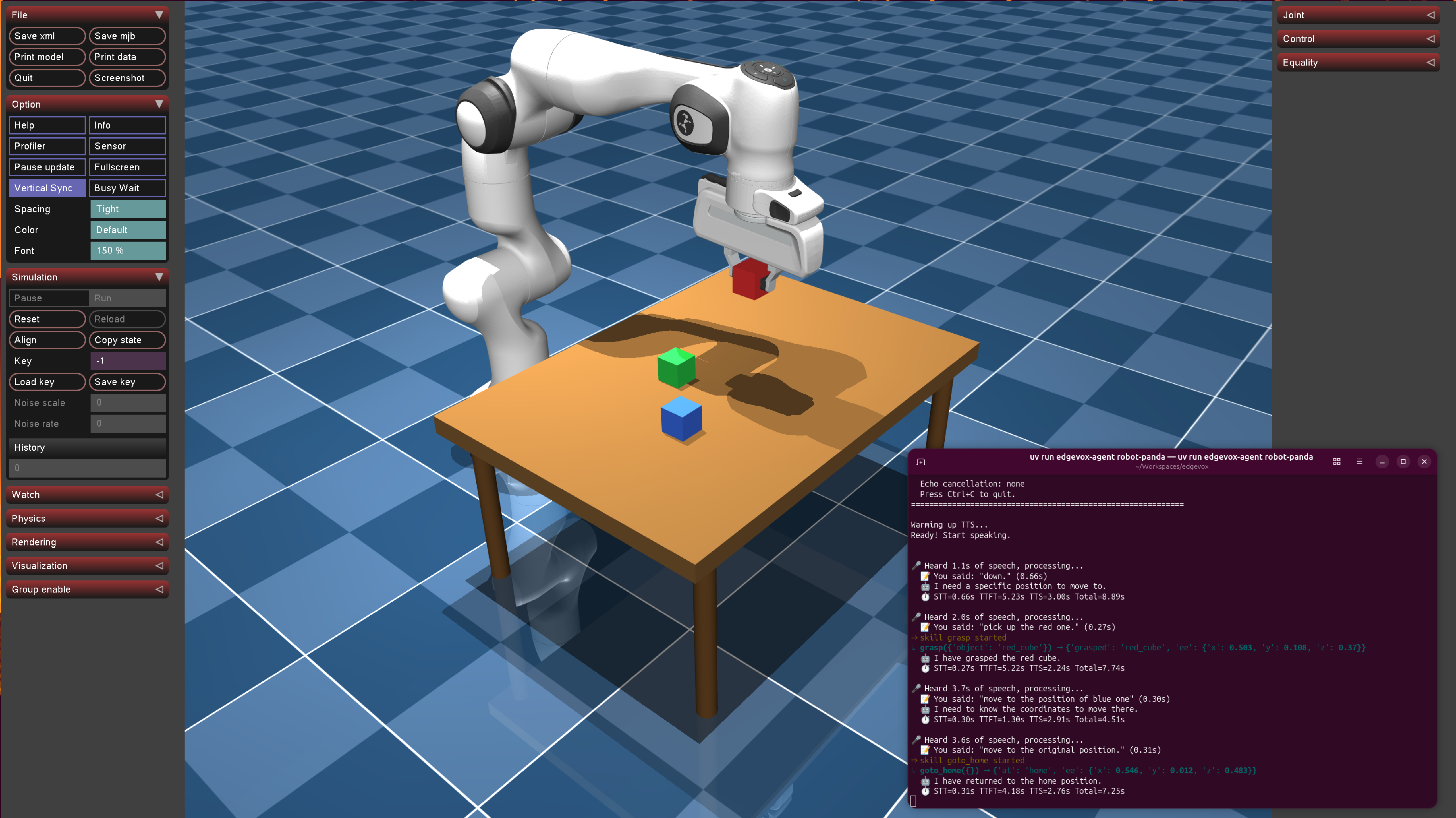
robot-panda — MuJoCo Franka arm pick-and-place
pip install 'edgevox[sim-mujoco]'
edgevox-agent robot-panda --text-modeA MuJoCo viewer opens with a Franka Panda arm above a table holding three coloured cubes. "pick up the red cube" moves the arm, grasps, and lifts. Voice input drives move_to, grasp, release, goto_home skills.
Tools exposed: list_objects, describe_workspace, get_gripper_state. Cancellable skills: move_to(target), grasp, release, goto_home — each wraps an IK + trajectory followup with poll-cancel plumbing so barge-in actually halts the arm mid-trajectory. Underlying: MujocoArmEnvironment — MuJoCo Apache-2, models in edgevox/examples/assets/panda/.
Good pick for: manipulation policies, demo-ing grasp failure modes, prototyping tool-use that requires spatial reasoning.
robot-humanoid — Unitree G1 / H1 with procedural gait
pip install 'edgevox[sim-mujoco]'
edgevox-agent robot-humanoid --simple-uiA Unitree humanoid (model auto-fetched from nrl-ai/edgevox-models on first use — ~15 MB) appears in the MuJoCo viewer standing on its home keyframe. Say "walk forward half a meter" / "turn left ninety degrees" / "stand" — a procedural gait swings legs + arms while the root pose advances. Swap in your own ONNX walking policy via MujocoHumanoidEnvironment.set_walking_policy(...) for real RL locomotion.
Tools exposed: list_joints, describe_pose, status. Cancellable skills: walk_forward(distance_m), turn(angle_deg), stand, set_stance(...). Underlying: MujocoHumanoidEnvironment — default weights under nrl-ai/edgevox-models/humanoid/ with upstream fallback; policy-slot loaded with onnxruntime.
Good pick for: testing your own RL locomotion policies against a natural-language driver without writing a keyboard UI.
robot-scout — single-agent scout, no sim dep
edgevox-agent robot-scout --text-modeMinimal-dep scout agent (no IR-SIM, no MuJoCo) that operates over ToyWorld — a stdlib-only grid sim good for CI tests and offline demos. Treats the grid as a room layout, plans paths with BFS, and reports "I walked to the kitchen, saw a mug on the counter".
Tools / skills: same tool surface as robot-irsim (go_to_room, describe_surroundings) so scripts port with a one-line env swap. Underlying: ToyWorld — pure stdlib, dataclass state, no native deps.
Good pick for: CI / unit tests, tutorials, offline environments. It's what the test suite uses for agent-loop smoke tests.
robot-external — ROS2-native for real robots or external sims
source /opt/ros/jazzy/setup.bash
edgevox-agent robot-external --text-modeSubscribes to odom, optionally scan / camera/image_raw; publishes cmd_vel and goal_pose. Drives any Gazebo Harmonic world, Isaac Sim (via the ROS2 bridge), or a physical mobile robot that speaks the standard contract — same agent code runs unchanged.
Tools / skills: go_to_pose, stop, describe_surroundings, execute_skill — mapped to the edgevox_skills/<name> action under the hood so a long-running skill reports feedback via ROS2 action topics. Underlying: edgevox.integrations.ros2_bridge — rclpy is a system package (not pip-installable) provided by the sourced ROS2 workspace.
Good pick for: bridging EdgeVox into an existing Gazebo / Isaac / physical-robot stack. See also ROS2 Integration for the bridge contract and QoS policy.
Pick your starting point
| Want to… | Start with |
|---|---|
| Understand the harness with zero 3D setup | robot-scout |
| See voice → mobile-robot navigation end-to-end | robot-irsim |
| Prototype grasping / spatial tool-use | robot-panda |
| Drive a humanoid / test an RL policy | robot-humanoid |
| Plug into Gazebo / Isaac / a real robot | robot-external |
Every example is ≤500 lines of Python. Copy one, rename it, swap in your own tools — that's the recommended authoring path for new robots.